5 juin 2024
Véhicules autonomes: la technologie existe, l’objectif est proche
Selon le professeur Philippe Giguère, ce rêve vieux de plus de 50 ans devient de plus en plus réalité grâce à l’intelligence artificielle et à la robotique mobile

'%3e%3cpath%20d='M306.615%2079.694H144.011L892.476%201150.3h162.604ZM0%200h357.328l309.814%20450.883L1055.03%200h105.86L714.15%20519.295%201200%201226.37H842.672L515.493%20750.215%20105.866%201226.37H0l468.485-544.568Z'/%3e%3c/g%3e%3c/svg%3e)



— Waymo
«Puissance de calcul embarquée, captation de l’information, centrales inertielles: depuis 10 ans on assiste à une révolution», affirme le professeur Philippe Giguère du Département d’informatique et de génie logiciel de l’Université Laval. «Perception, localisation, planification, intelligence artificielle: tout ça mis ensemble, poursuit-il, cette recette fait qu’aujourd’hui, on peut rêver à des véhicules autonomes qui vont circuler sur nos routes.»
Le 28 mai, le professeur Giguère a prononcé une conférence en ligne et en salle dans le cadre des activités de formation continue grand public de la Faculté des sciences et de génie. Le titre de sa présentation était «Google Car et compagnie: comment fonctionnent les véhicules autonomes?».
Le conférencier a commencé sa présentation par une image spectaculaire. En 1956, le journal américain Saturday Night Post publiait une publicité payée par des compagnies d’électricité (America’s Electric Light and Power Companies). Sur cette illustration en noir et blanc, une vision futuriste de la conduite automobile était proposée. On voyait une famille composée des deux parents et de deux enfants en train de jouer à un jeu de société à l’intérieur d’une voiture autonome qui filait à bonne vitesse sur une «super autoroute électrique». La légende mentionnait que le volant était contrôlé par des dispositifs électroniques encastrés dans la route. Grâce à l’électricité, les embouteillages, les collisions et la fatigue du conducteur appartiendrait désormais au passé.
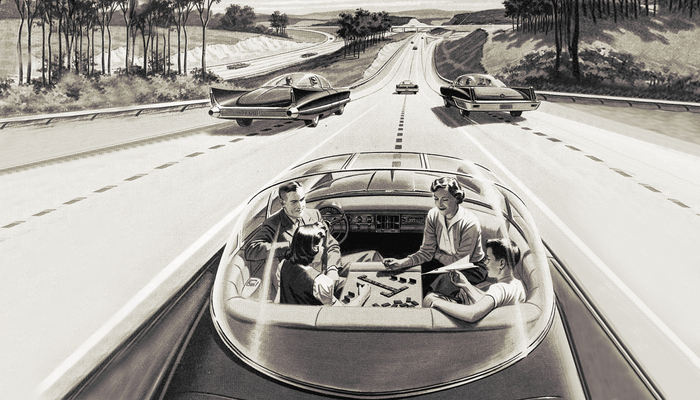
Une vision futuriste de la conduite automobile telle qu’imaginée en 1956 et publiée dans le journal Saturday Night Post.
— America’s Electric Light and Power Companies
L’Université Stanford, la pionnière
Selon Philippe Giguère, le concept de véhicule autonome pique beaucoup la curiosité des gens aujourd’hui et cet intérêt, comme le montre la publicité, ne date pas d’hier. Il rappelle que les balbutiements de la recherche en matière de systèmes robotiques mobiles remontent aux années 1960. Cela se passait à l’Université Stanford. «Les chercheurs ont développé un robot mobile monté sur roues, explique-t-il. L’ordinateur embarqué miniaturisé avait une capacité de calcul de 192 kilo-octets, alors qu’aujourd’hui, les ordinateurs ont une mémoire de peut-être un million de fois supérieure. Le robot était équipé d’une antenne radio pour pouvoir communiquer et d’une caméra de télévision pour la vision. La majorité des calculs se faisaient à l’intérieur du robot. Celui-ci identifiait un obstacle sur sa trajectoire, le contournait et se rendait à destination.»
Au fond, les véhicules autonomes d’aujourd’hui ne sont pas tellement différents de ce robot. «L’objectif d’un robot mobile, dit-il, est de partir d’un point de départ A et d’aller à un point d’arrivée B tout en évitant les obstacles sur le chemin. Avec le robot de Stanford, des chercheurs ont dit: "On peut commencer à sortir des laboratoires. Tentons maintenant de résoudre les problèmes pour des véhicules routiers".»
L’année 2004 est à marquer d’une pierre blanche dans la recherche sur les véhicules autonomes aux États-Unis. Cette année-là, la Defense Advanced Research Projects Agency (DARPA) lance un grand concours doté d’une bourse d’un million de dollars pour la mise au point d’une voiture ou d’un camion capable de se déplacer de façon entièrement autonome dans le désert sur un parcours de 240 kilomètres. Résultat: sur les 215 équipes participantes, la meilleure ne réussit qu’à franchir 11,8 kilomètres. Un an plus tard, la DARPA relançait le concours.
«Le défi était de couvrir 212 kilomètres, toujours dans le désert, raconte le professeur Giguère. Cinq équipes ont terminé la course et celle de Stanford a gagné. Les véhicules étaient équipés d’une panoplie de capteurs. Ils étaient très instrumentés. Le progrès réalisé en un an était fantastique.»
Cette réussite technologique fut suivie en 2007 par le DARPA Urban Challenge. Le défi, cette fois, consistait à évoluer dans un contexte urbain. Les voitures étaient télécommandées tandis que d’autres étaient pilotées par des humains pour simuler la circulation routière. Tous les véhicules devaient respecter le code de la route, effectuer des stationnements à reculons. L’équipe de l’Université Carnegie Mellon est ressortie vainqueur.
«Ce qu’on constate, poursuit-il, est que la plupart des grandes entreprises et des jeunes pousses qui sont actives de nos jours dans la recherche sur les véhicules autonomes sont issues des concours DARPA. Ces concours ont été un déclencheur important. L’activité de recherche a dû générer pas loin d’une centaine de milliards de dollars depuis. Le gouvernement américain, avec très peu d’argent sous forme de prix, a donc réussi à créer de toutes pièces une nouvelle industrie.»
Facteurs de succès
Pourquoi, jusqu’au début des années 2000, ne pouvait-on pas créer de véhicules autonomes, alors que nous avons aujourd’hui des systèmes proches de cet objectif?
«Le premier facteur de ce succès est la puissance de calcul embarquée, répond le professeur. Ceux qui ont des cartes graphiques Nvidia ont littéralement accès à un super-ordinateur du début des années 2000 qui coûtait peut-être deux milliards de dollars. Aujourd’hui, vous avez la même puissance de calcul dans une carte graphique très avancée. C’est pratiquement inimaginable de voir une telle puissance compressée dans une puce électronique qui ne coûte que quelques milliers de dollars.»
Un autre facteur décisif concerne la captation de l’information au moyen de capteurs peu coûteux. Même chose pour les centrales inertielles, qui permettent de mesurer les changements d’orientation, les accélérations linéaires et le champ magnétique. Enfin, de grandes avancées ont été faites dans le domaine des réseaux de neurones profonds en intelligence artificielle pour l’exploitation de la puissance de calcul.
«Depuis 10 ans, soutient-il, on voit une révolution qui fait qu’aujourd’hui, on peut rêver à des véhicules autonomes qui vont circuler sur nos routes.»
Des aspects sociétaux de poids
La voiture est un acteur majeur de la vie moderne, mais parfois pour les mauvaises raisons. Elle cause 1,2 million de morts chaque année dans le monde. Aux États-Unis, elle occasionne de grandes pertes de productivité: 38 heures en moyenne par an pour chaque travailleur. L’entretien des infrastructures routières coûte cher. Quant aux deux milliards de places de stationnement aux États-Unis, elles se traduisent par une perte d’espace considérable, le conducteur devant stationner sa voiture chez lui, au travail, pour les loisirs, au centre commercial et autres.
«Un autre aspect sociétal, plus positif, concerne tous ces gens qui ne sont plus aptes à conduire, souligne Philippe Giguère. Un véhicule autonome leur redonnera une mobilité de déplacement, une liberté de mouvement qu’ils ont perdue en raison de leur âge avancé, de leur santé chancelante ou d’un handicap.»
Selon lui, on constate graduellement un changement de mentalité par rapport aux véhicules autonomes. «Mais, dit-il, ce qui retarde de beaucoup leur adoption sont les événements à longue traîne.»
On appelle ainsi les événements très très peu probables pouvant survenir sur la route. On peut penser ici à un objet comme une chaise qui tombe accidentellement de la caisse d’une camionnette. Ou bien à l’image d’un véhicule qui se reflète sur une surface réfléchissante, comme l’arrière d’une citerne, et qui, par effet miroir, semble foncer vers le véhicule autonome. «Un des éléments qui font qu’en ce moment, le véhicule autonome a de la difficulté à s’imposer est qu’on n’arrive pas à épuiser la source infinie d’événements à longue traîne qu’il faut traiter. Les fabricants sont vraiment rendus à une phase de raffinement, mais elle est ralentie par la gestion de ces événements.»
À court terme, la dure réalité économique s’impose à cette industrie naissante. Apple a fermé sa division de voitures autonomes il y a environ six mois. Ghost Autonomy a fermé ses portes, tout comme Argo AI. De leur côté, Waymo et Cruise ont mis à pied respectivement 8% et 24% de leur personnel. «Les gens disent: "On n’a pas de retour sur investissement"», explique le professeur.
Selon lui, la technologie existe. Tous les grands manufacturiers automobiles ont un groupe de recherche en ce domaine. «Je pense que les véhicules autonomes vont venir bouleverser la société, un peu comme Internet l’a fait, soutient-il. En ce moment, nous sommes dans une phase de consolidation, mais je pense qu’on s’approche d’une solution. Une de ces solutions sera le déploiement de robotaxis et du camionnage, qui sont ou qui seront nécessairement disponibles.»
Voir l’enregistrement de la conférence du professeur Giguère